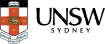

2D SLAM Map of the CSE Robotics Lab
Our research group has a long history of research in position tracking and SLAM, particularly for autonomous robots in the RoboCupRescue Robot competition. Most recently, our research has focused on implementing position tracking and SLAM algorithms on GPUs using full 3D information to produce correctly aligned and accurate 3D maps.
The software is open source and available here: http://robolab.cse.unsw.edu.au:4443/rescue
Publications in Position Tracking and SLAM include:
- A. Ratter, C. Sammut. Fused 2D/3D Position Tracking for Robust SLAM on Mobile Robots. International Conference on Intelligent Robots and Systems, 2015.
- A. Ratter, C. Sammut. Local Map Based Graph SLAM with Hierarchical Loop Closure and Optimisation. Australasian Conference on Robotics and Automation, 2015.
- A. Ratter and C. Sammut, GPU Accelerated Parallel Occupancy Voxel Based ICP for Position Tracking, 2013 Australasian Conference on Robotics and Automation, Sydney, Australia, pp. 394–403, 2013.
- A. Ratter, C. Sammut, M. McGill. GPU Accelerated Graph SLAM and Occupancy Voxel Based ICP For Encoder-Free Mobile Robots. International Conference on Intelligent Robots and Systems, 2013
- A. Milstein, M. McGill, T. Wiley, R. Salleh, and C. Sammut, A Method for Fast Encoder-Free Mapping in Unstructured Environments, Journal of Fields Robotics: Special Issue on Safety, Security, and Rescue Robotics, vol. 28, no. 6, pp. 817–831, 2011
- A. Milstein, M. McGill, T. Wiley, R. Salleh, and C. Sammut, Occupancy voxel metric based iterative closest point for position tracking in 3D environments, IEEE International Conference on Robotics and Automation, pp. 4048 – 4053, 2011.

3D SLAM Map of the CSE Robotics Lab