
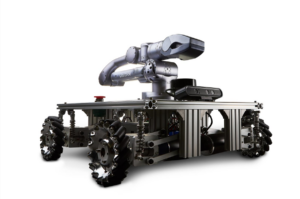
The UNSW@Work team is working towards successfully competing in RoboCup@Work 2024. The team is researching and developing an autonomous holonomic robotic platform capable of navigation around a simulated factory floor to collect and deliver items with a robotic arm. The project involves the integration of LIDAR and depth sensing sensors, SLAM based navigation and computer vision techniques for object recognition to tackle the dynamic environment of a factory floor.