Our research group has particular expertise in the area of General Game-Playing (GGP) and we have been active in extending this notion to the robotics domain. GGP is the attempt to create AI systems that can understand and learn to play new games without human intervention. Extending GGP to the robotics domain requires moving beyond a virtual/abstract environment to consideration of game playing within an embodied physical environment.
For example, a domestic robot tasked with fetching an item has to consider the possibility that the item may not be where it expects, or that the human operator may change locations after issuing the request. Viewing such a task as a game can provide a framework for developing more natural and intuitive robot behaviours.
Publications include:
- D. Rajaratnam and M. Thielscher. Execution Monitoring as Meta-Games for General Game-Playing Robots. Proceedings of the 25th International Joint Conference on Artificial Intelligence, 2015.
- D. Rajaratnam and M. Thielscher. Towards General Game-Playing Robots: Models, Architectures and Game Controller. Proceedings of Australasian Joint Conference on Artificial Intelligence, 2013.

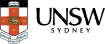
Architecture for General Game Playing Robots